Mehr Information
Hauptautor
Lugner P.
Co-Autoren
-
Medientyp
PDF-Dokument
Publikationsart
Vortrag
Erscheinungsjahr
2016
Verlag
25. EVU Congress, Bratislava
Literaturstelle
-
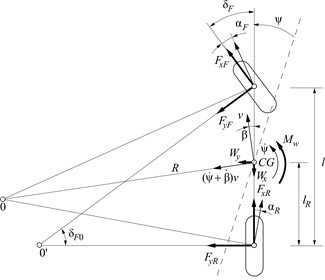
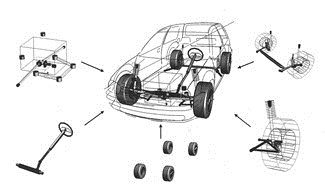 Diese Studie beginnt mit zuerst mit den einfachen Modellen der Fahrzeuge und erklärt die Haupteigenschaften der Untersteuerung, Übersteuerung, der Stabilität, der Lenkung und der Bremsung. Die mehr vollständigen Modelle der Fahrzeuge mit der Bewegung der 3D Karosserie und des komplexen Modells der Reifen machen es möglich, das Friktionsverhalten eines jeden Rades und das Verhalten des nicht linearen Systems zu begreifen. Aus den komplexen nicht linearen Unterstrukturen wird das „der Wirklichkeit ähnliche Modell“ heraus gebildet, und zur Berechnung des Systemverhaltens, einschließlich der Daten über die inneren Auswirkungen, wird das Software für Mehrkörper-Systeme verwendet, wie zum Beispiel SIMPACK, aber auch PC-Crash. Die Modelle dieser Art, welche die Verhaltensweise des Systems darstellen, sind beinahe identisch, wie in der Wirklichkeit, wobei sie zur Entwicklung der Fahrzeuge, Abstimmung der Lenkungssysteme und auf dem Gebiet der Rekonstruktion von Verkehrsunfällen bei den nicht linearen Vor- und Nachkollisionssimulationen verwendet werden.
Diese Studie beginnt mit zuerst mit den einfachen Modellen der Fahrzeuge und erklärt die Haupteigenschaften der Untersteuerung, Übersteuerung, der Stabilität, der Lenkung und der Bremsung. Die mehr vollständigen Modelle der Fahrzeuge mit der Bewegung der 3D Karosserie und des komplexen Modells der Reifen machen es möglich, das Friktionsverhalten eines jeden Rades und das Verhalten des nicht linearen Systems zu begreifen. Aus den komplexen nicht linearen Unterstrukturen wird das „der Wirklichkeit ähnliche Modell“ heraus gebildet, und zur Berechnung des Systemverhaltens, einschließlich der Daten über die inneren Auswirkungen, wird das Software für Mehrkörper-Systeme verwendet, wie zum Beispiel SIMPACK, aber auch PC-Crash. Die Modelle dieser Art, welche die Verhaltensweise des Systems darstellen, sind beinahe identisch, wie in der Wirklichkeit, wobei sie zur Entwicklung der Fahrzeuge, Abstimmung der Lenkungssysteme und auf dem Gebiet der Rekonstruktion von Verkehrsunfällen bei den nicht linearen Vor- und Nachkollisionssimulationen verwendet werden.
(EVU-Mitglieder können den ganzen Beitrag herunterladen)