More information
Main author
Evert Klem
Co-Authors
Mark Gorter
Type of media
Publication type
Lecture
Publication year
2017
Publisher
26. EVU Conference, Haarlem
Citation
-
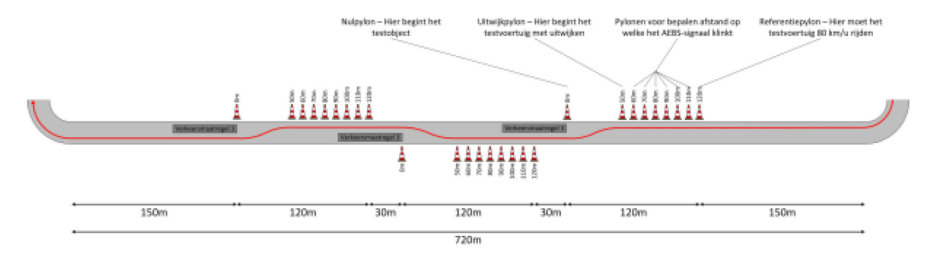
Goal: Advanced Driver Assist Systems are intended to improve traffic safety. But this is only possible when the systems work flawlessly and when the driver uses them correctly. We examined how ADAS systems are used in practice and if improvements can be suggested to achieve a safe implementation. These systems are assessed based on their technical functioning and limits, the way they depend on road infrastructure and other road users and the way they influence the driver’s behavior. The systems we assessed are Adaptive Cruise Control (ACC) and Lane Keeping Systems (LKS), as well as the Autonomous Emergency Braking Systems (AEBS) and the way these interact with traffic measures such as impact attenuators, pylons and so on. We want to show if and how these systems and their usage can be improved, and how drivers, vehicle manufacturers and road authorities can contribute to achieve a better and safer use of ADAS. Method: Adaptive Cruise Control is assessed by designing a field test consisting of eight ACC-users, which were being recorded in their normal usage of the car on highways. Also a questionnaire is distributed and filled in by 180 ACC-users. Lane Keeping Systems are assessed by testing four different cars with the system. We used these four cars to repeatedly drive a specified route consisting of different road sections with different lane markings quality. For every road stretch is determined if the LKS system is able to ‘see’ the road markings. Also on LKS a questionnaire is distributed and filled in by 80 respondents. The quality of AEBS systems is determined by testing the systems in six different vehicles (cars and trucks) on several traffic measures such as impact attenuators, pylons and so on, to determine if the system warns and brakes when approaching these traffic measures.
(EVU-members can download the full article)